When something moves or vibrates—like a rubber pad or a metal beam—it slowly comes to rest because it loses energy. This energy loss is called damping. In Abaqus, material damping is how we simulate this behavior to make models act more like real-world materials.
In Abaqus, there are different kinds of damping. Material damping Abaqus deals with energy lost inside the material itself, while contact damping handles energy lost where surfaces touch. Automatic stabilization, on the other hand, is not real damping—it’s a numerical trick to keep the simulation from crashing. Knowing the difference is important, because using the wrong one can lead to misleading results.
In this blog, we focus on material damping. You’ll learn about four main types: Rayleigh damping for general dynamic simulations, composite damping for modal analysis, structural damping for frequency-based problems, and viscoelastic Abaqus damping for materials that naturally lose energy over time. We’ll also explain when to use each method and how to set them up in Abaqus. By the end, you’ll have a full understanding of how to apply material damping correctly to get more realistic and stable simulations.
Introduction to Abaqus Damping
If your simulation involves motion, time, impact, or contact, and you care about how it settles or vibrates, you almost certainly need some form of damping. In general, the loss of energy in movements, impacts, or contacts is called damping. In simulations, we need to include this behavior to get realistic results. That’s where material damping Abaqus comes in.
By adding damping to your model, you help it behave more like the real world. It becomes especially important in dynamic problems like vibration, shock, or impact. Without damping, your model might keep vibrating endlessly or give results that don’t make sense.
Think of damping like the shock absorbers in a car. They don’t stop the motion completely, but they help control it. That’s exactly what damping does in your Abaqus simulations.
Sources of Damping in Abaqus
Abaqus offers several ways to introduce damping into your model. Each one comes from a different source and works in different situations. Before jumping into material damping Abaqus options, it’s important to know the different sources of damping available in Abaqus. Understanding these helps you choose the right method for your problem and avoid using the wrong type.
- Material Damping: This is the main focus of this blog. It simulates how real materials internally resist motion and lose energy. It includes common methods like Rayleigh damping, modal damping, and viscoelastic damping. These are defined either in the material properties or in special dynamic steps. We’ll explore these in detail throughout the blog.
- Geometric Damping: This occurs in simulations with large deformations. As the shape of a structure changes, the way it dissipates energy can change too. It’s rare and usually not added manually.
- Numerical Damping: This is artificial damping added by the solver. It’s built into Abaqus/Explicit to help keep simulations stable. It doesn’t come from material behavior but from how the equations are solved. You can learn more about this type in this blog: “Automatic Stabilization Abaqus of Unstable Problems“.
- Contact Damping: This is used in models with contact interactions. When parts touch and move against each other, some energy is lost through friction or stabilization. Abaqus can apply damping to handle these effects. Our blog “What is Abaqus Contact Damping and how to apply it in Abaqus?” can help you to know more about Abaqus contact damping.
- Dashpot Elements: Abaqus has special elements called dashpots that model mechanical dampers. These are used when you want to simulate a damper as part of the structure, like in automotive suspension systems.
Each method has its place. But material damping is the most direct way to represent energy loss inside materials.
Why is Material Damping Important in Simulation?
Imagine you’re testing a car suspension. If you hit a bump and the car keeps bouncing forever, that’s a problem. In real life, materials and structures don’t behave like that. They lose energy and come to rest. That energy loss is caused by damping.
In simulations, we must recreate this behavior. Without damping, your model could show endless vibrations or unstable results. This is where Abaqus damping becomes essential.
Let’s look at some reasons why you should always consider material damping Abaqus when working with dynamic problems:
- Realistic Vibration Response
- Many structures vibrate when loaded. Like Bridges, and engines. By adding material damping, you simulate how real structures behave under vibration.
- Improved Stability in Dynamic Simulations: Without damping, your dynamic analysis may become unstable. This improves convergence and prevents simulation failure.
- Accurate Energy Dissipation: If your goal is to calculate how much energy is lost during impact or motion, material damping helps you estimate how much energy is absorbed by the material.
- Critical for Some Materials: Some materials, like rubber, polymer foams, or biological tissues, naturally show time-dependent damping. You can’t model them accurately without it. That’s why viscoelasticity (which we’ll explain later) is so important.
In short, material damping makes your simulation more realistic, stable, and useful. Whether you’re running a modal analysis or a crash simulation, damping should be part of your model.
Overview of Material Damping in Abaqus
Abaqus offers several ways to add material damping to your simulation. Each method serves a specific purpose. Picking the right one depends on your analysis type, modal, transient, or steady-state. Let’s look at the most common types of Abaqus material damping.
Rayleigh Damping
Rayleigh damping is one of the most widely used damping methods in Abaqus. It’s also called mass and stiffness proportional damping. It provides a convenient abstraction to damp lower (mass-dependent) and higher (stiffness-dependent) frequency range behavior. You define it using two values:
- Alpha (
 ): controls damping based on mass.
): controls damping based on mass. - Beta (
 ): controls damping based on stiffness.
): controls damping based on stiffness.
The damping matrix C is calculated as:
![]()
Where:
- C is damping matrix
 is mass-proportional damping coefficient
is mass-proportional damping coefficient- M is mass
 is stiffness-proportional damping coefficient
is stiffness-proportional damping coefficient- K is stiffness matrices
The damping ratio ζ, for each frequency ω is:

This formula helps you tune damping at a specific frequency by solving for α and β.
When to Use Rayleigh Damping:
- Best for transient dynamic simulations.
- Good choice for general energy dissipation.

Figure 1: Setting alpha and beta values in the Property module
The figure below shows how Rayleigh damping behaves across different frequencies in an Abaqus model. The blue line is the total damping ratio. It combines two parts: mass damping (green), which is stronger at low frequencies, and stiffness damping (red), which increases with frequency. This balance helps you control vibration realistically. By adjusting alpha and beta, you shape the damping curve to match your needs.

Figure 2: Rayleigh damping, damping ratio vs frequency
Composite Modal Damping
This type is used in modal dynamics. Instead of applying damping globally, it calculates how each mode shape should be damped based on the material properties.
Here, ζ is the fraction of critical damping applied to each material. Abaqus uses this value to calculate modal damping ratios based on the contribution of each material to each mode:

Where:
 is damping ratio for mode i.
is damping ratio for mode i. is composite damping factor for material k.
is composite damping factor for material k. is stiffness matrix of material k.
is stiffness matrix of material k. is total stiffness matrix.
is total stiffness matrix. is mode shape vector for mode i (here
is mode shape vector for mode i (here  is transposed of ).
is transposed of ).
To use it, you define damping in the material (![]() ) and run a frequency extraction step first. Then Abaqus automatically calculates the damping for each mode. As you can see in the next figure its available from Property module. It’s a unitless value between 0 and 1.
) and run a frequency extraction step first. Then Abaqus automatically calculates the damping for each mode. As you can see in the next figure its available from Property module. It’s a unitless value between 0 and 1.

Figure 3: Setting Composite values in the Property module
When to Use Composite Damping
- Gives realistic damping per mode—great for flexible structures.
Structural Damping
Structural damping assumes the damping force is directly proportional to the internal forces, but it acts opposite to motion. It’s only available in frequency-based analyses like:
- Steady-state dynamics
- Random response
In the physical interpretation, structural damping means that the damping force is proportional to the internal force, but acts opposite to motion.
![]()
Where:
- F is damping force (vector)
- S is structural damping coefficient (unitless)
 is internal elastic force (from stiffness)
is internal elastic force (from stiffness)
The Structural damping like other material damping tools is available from Property module in Abaqus.
When to Use Structural Damping
- Use in harmonic or random vibration studies.
- Common in vibration isolation or acoustic simulations.
Viscoelastic Abaqus as Material Damping
Not all damping needs to be added manually using coefficients like Alpha or Beta. Some materials naturally lose energy when they deform. This is known as viscoelasticity and it’s a powerful way to model realistic Abaqus material damping.
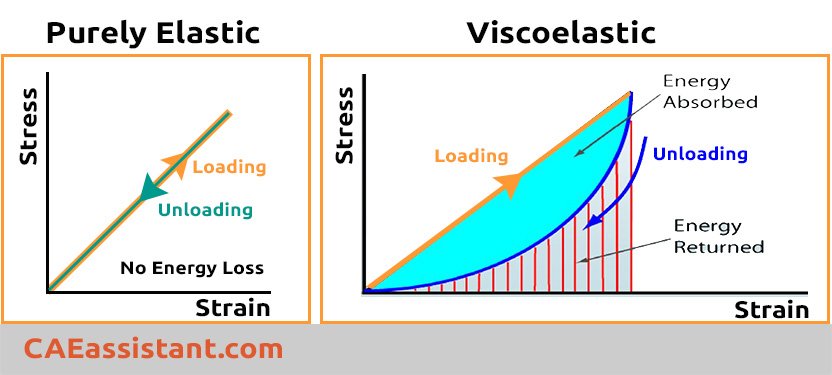
Figure 4: Viscoelastic vs. elastic material behavior
What is Viscoelastic Damping?
Viscoelastic materials behave like a mix of a spring and a dashpot. They store energy (like elastic materials), but they also lose energy over time or under repeated loading. This time and frequency dependent behavior creates built-in damping.
Examples of viscoelastic materials include:
- Rubber
- Foams
- Some polymers
If your material shows creep, stress relaxation, or energy loss under cyclic loading, it’s a good candidate for viscoelastic modeling.
Abaqus Viscoelastic Tutorial: Available Viscoelasticity Model in Abaqus
In Abaqus, viscoelastic material is available from property module, mechanical submenu as you can see in next figure.

Figure 5: Viscoelastic property in Abaqus
Generally, in Abaqus viscoelasticity is available in two forms:
- Time-domain viscoelasticity
In this method, you define how the material relaxes over time after a sudden strain.
This is perfect for modeling:
- Stress relaxation
- Creep
- Rubber-like damping
- Frequency-domain viscoelasticity
This is used when your model is subject to cyclic or harmonic loading. Instead of tracking time-based decay, provides how the material behaves at different frequencies.

Figure 6: Frequency and Time domains for viscoelasticity in Abaqus
- When should we use Time vs Frequency domain?
Next table briefly explain when we can use each domain.
| Domain | Use it when | Analysis Types |
| Time Domain | You simulate time-based effects like creep or relaxation | Transient dynamics, quasi-static |
| Frequency Domain | You run harmonic or modal analyses with sinusoidal loading | Steady-state dynamics, modal dynamics |
Both represent real damping caused by internal friction and time-dependent behavior in materials.
In Abaqus each domain offers different types of viscoelasticity damping that you can see in the next figure. Among them, the most important and widely used is The Prony series damping.

Figure 7: options available for time domain and frequency domain
Prony series Abaqus: Most Common Viscoelastic Damping Model
The Prony series is the most common and powerful way to define viscoelastic material behavior in Abaqus. It allows to simulate how real materials like rubbers gradually lose energy over time. When used correctly, it gives your simulation realistic internal damping without needing artificial damping values like Rayleigh or structural damping. It can be defined directly in the time domain, and also reused automatically in the frequency domain via transformation.
A common way to express the Prony series is in terms of the shear relaxation modulus:

Where:
 is time-dependent shear modulus
is time-dependent shear modulus is initial shear modulus
is initial shear modulus is Prony coefficients
is Prony coefficients is time constant (relaxation times)
is time constant (relaxation times) is number of Prony terms
is number of Prony terms
Parameters You Need to Enter in Abaqus
To define a Prony series in Abaqus you must provide:
- is relative modulus ratio
- is bulk modulus ratio
- is relaxation time

Figure 8: Prony series in Abaqus property module
If you define a Prony series for a material, Abaqus can also convert it automatically into a complex modulus for frequency-domain simulations. This means you can use the same data for both time and frequency domains.
Conclusion
This article was about material damping in Abaqus and how to use it to simulate energy loss in dynamic problems. We explained different damping methods available in Abaqus and when to use each one.
Understanding damping is important because it helps your simulation behave more like real materials. Without damping, results can become unrealistic or unstable. In this article, we first looked at different sources of damping in Abaqus, such as geometric, numerical, and contact damping, but focused mainly on material damping.
Then, we covered the main types: Rayleigh damping for general dynamic problems, composite damping for modal analysis, structural damping for frequency-based studies, and viscoelastic damping for materials with time and frequency dependent behavior. We also explained how the Prony series works as the most common method for modeling viscoelasticity.
In short, each damping type serves a specific purpose, and choosing the right one helps create accurate and stable simulations. This guide gives you the basics needed to apply material damping effectively in Abaqus.
Damping is an influence within or upon a dynamic system that has the effect of reducing, restricting or preventing its movements. In physical systems, damping is produced by processes that dissipate energy.
Generally, Damping results from several sources, such as inelastic dissipation (Material nonlinearity), material behavior (Internal friction), and joint behavior (External friction).
There are two primary aspects for defining damping available in Abaqus. The most widely used damping form is called viscous damping, in which the damping force is velocity-proportional. Sometimes the damping force is Displacement-proportional such as the friction at the supports. This damping form is called Structural damping (imaginary stiffness).
There are two main reasons for adding damping to a model: to limit numerical oscillations or to add physical damping to the system. Damping is also beneficial when modeling high-speed phenomena and noisy dynamics.
In general, Abaqus has five categories of damping definition sources: Abaqus Material damping, Element damping (spring elements, dashpot elements, and connector elements), Abaqus global damping (constant damping coefficient), Modal damping (in mode-based linear dynamic analyses), and Artificial damping (numerical damping).
There are three options to provide material damping in Abaqus. The viscoelasticity model is useful for materials in which dissipative losses are primarily caused by viscous (internal damping) effects. Rayleigh damping Abaqus (Viscous damping) is used to introduce general damping in models without dissipation sources (an example is a linear system with chattering contact, such as a pipeline in a seismic event). Another option is to use Abaqus structural damping. The damping forces due to structural damping are intended to represent frictional effects (as distinct from viscous effects).
[/accordion_item]











2 Responses
Really thank you! Want more.
Very interesting information!Perfect just what I was searching for! Filia Kendrick Teriann