Liquid sloshing is the back-and-forth movement of a liquid inside a container when the container itself is moved or shaken; in this case, in a cylindrical tank “the movement of the free surface of a liquid inside a tank due to earthquake acceleration,” and its “height… is a critical factor in designing liquid storage tanks, as it directly affects the risk of damage to the tank’s roof.”
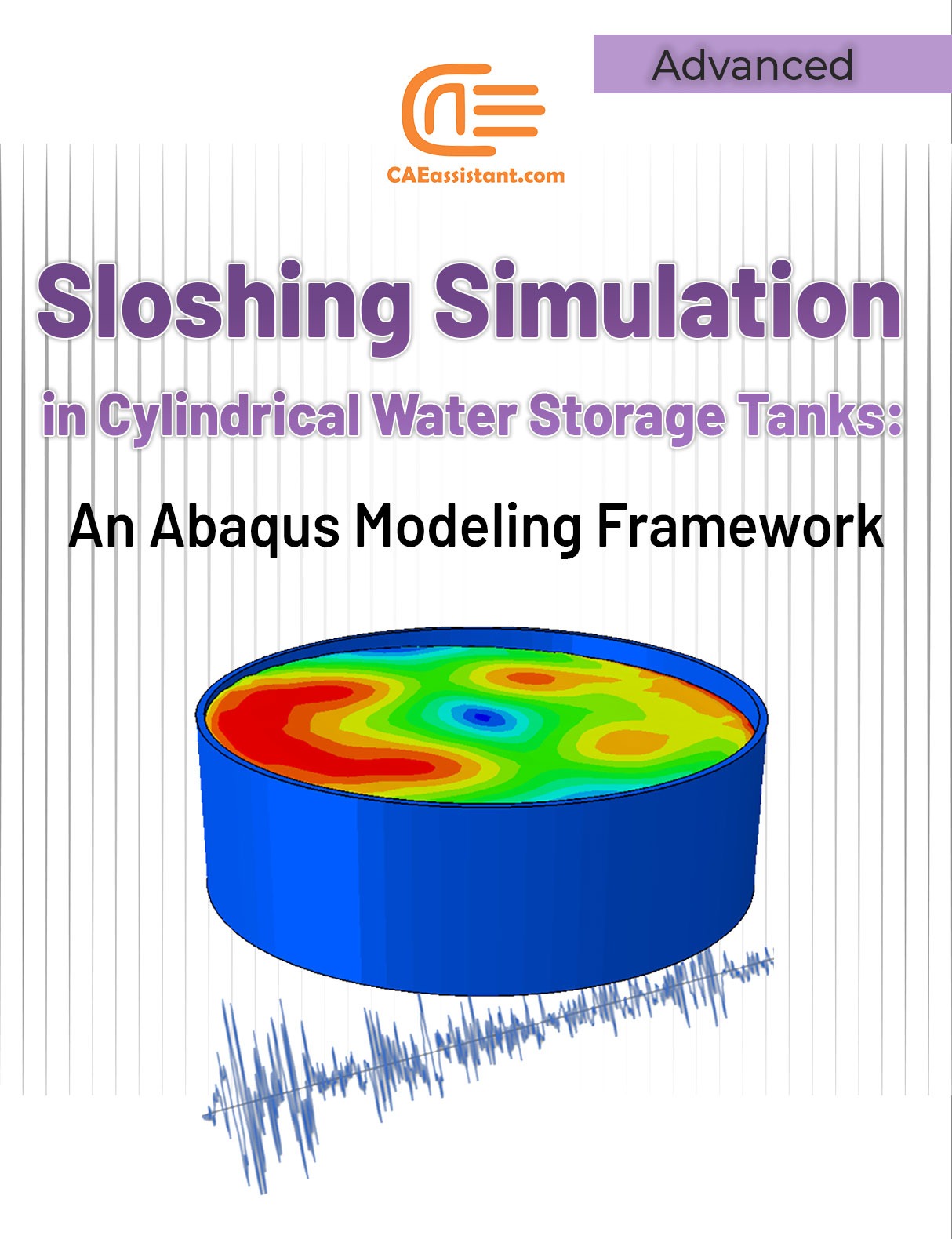
This project focuses on the application of Abaqus CAE to analyze the phenomenon of liquid sloshing in cylindrical, ground-supported liquid storage tanks. The primary objective of this sloshing simulation is to “evaluate the maximum sloshing height of the water adjacent to the wall” and “plot the overall deformed shape of the system during the earthquake.” The simulation specifically models a concrete tank filled with water, subjected to the horizontal acceleration of the El-Centro earthquake.
What is Sloshing and Why is it a Critical Factor in Tank Design?
Sloshing refers to the movement of the free surface of a liquid inside a tank, often caused by external forces like earthquake acceleration.
In tank design, sloshing is a critical factor. The height of liquid sloshing directly impacts the risk of roof damage.
Accurate sloshing simulation helps engineers design tanks that resist dynamic liquid behavior. This prevents structural failures and reduces the risk of spills.

Figure 1: Sloshing in a pool
Software Used for Tank Sloshing Simulation
The primary tool for tank sloshing simulation in this project is Abaqus CAE. Several key features are applied:
- Us-Up model: Used to study the behavior of water inside Abaqus.
- Arbitrary Lagrangian-Eulerian (ALE) adaptive meshing: Prevents mesh distortion when water experiences large deformations.
- Hourglass control: Reduces unwanted hourglass modes, which are common in inviscid fluid simulations.
- Mass scaling: Speeds up the simulation with minimal effect on sloshing patterns.
-
Defining interactions and boundary conditions: Models water contact with the tank wall and base, while applying external loads such as gravity and earthquake acceleration.
The example simulation uses horizontal acceleration from the El-Centro earthquake. This earthquake record provides realistic dynamic input for analyzing sloshing in a cylindrical, ground-supported storage tank.

Figure 2: Tank Sloshing model
Material Properties in the Tank Sloshing Simulation
When we simulating a tank sloshing simulation, we need to model two parts: one for the tank itself and another for the water. Here you can see the material properties for each part:
Concrete Tank Properties
The concrete tank is modeled as a rigid wall. Its properties are:
- Elastic modulus (E): 248.6 GPa
- Poisson’s ratio (ν): 0.16
- Density (ρ): 2400 kg/m³
Rayleigh damping coefficients are also defined:
- Mass coefficient (α): 0.0089
- Stiffness coefficient (β): 0.00052
These follow ACI standards based on impulsive and convective modes.
Water Properties
For water, the Us-Up Hugoniot equation of state is used. Its properties are:
- Speed of sound (c0): 1484 m/s
- Density (ρ): 1000 kg/m³
- Dynamic viscosity: 0.00065 Pa.s (in older Abaqus versions)
In newer Abaqus versions (2020/2022), Rayleigh damping can be directly applied. This makes water behave as an inviscid fluid, aligning with reference models.
Housner’s Model in Tank Sloshing Simulation
Housner’s model, part of the ACI standard, explains tank dynamics using two responses:
- Impulsive response: The combined behavior of the tank and the bottom water section.
- Convective response: The motion of the liquid surface at the top.
This model is essential for calculating natural frequencies for both responses. Recommended damping ratios are:
- 5% for impulsive mode
- 0.5% for convective mode
These frequencies and damping ratios help determine Rayleigh damping factors (α and β) in Abaqus simulations.
You can learn more details about this model in our full tutorial, PDF guide from page 9 onward.
Key Steps in the Sloshing Simulation Project
The procedure for running a sloshing simulation in Abaqus includes:
- Set up the environment: Choose a consistent unit system, such as SI.
- Create parts: Model the tank base (rigid shell), wall (deformable 3D solid), and water (deformable 3D solid).
- Define materials and sections: Assign properties for concrete and water, including damping factors.
- Assemble the model: Place all created parts in correct positions.
- Define steps and outputs: Use dynamic explicit steps, set simulation time, and configure ALE adaptive meshing.
- Define interactions: Establish contact between water, walls, and the base.
- Apply loads and boundary conditions: Set displacement constraints, gravity, hydrostatic pressure, and earthquake acceleration.
- Generate elements and mesh: Apply suitable element sizes and types for each part.
-
Submit the job: Run the simulation, often with parallel processing for efficiency.
Validation of the Sloshing Simulation
The accuracy of the tank sloshing simulation is validated by comparing results with a reference solution. This solution is from ANSYS APDL, based on the paper “Parametric study on dynamic behavior of cylindrical ground-supported tanks.”
The Abaqus results aim to closely match the ANSYS APDL data, with minor differences due to solver variations, mesh setups, and damping or viscosity handling.
Figure 3: Sloshing simulation results

Figure 4: Validation of sloshing simulation
You can see all the detail about the validation in our full tutorial, PDF guide from page 54 onward.
Future Improvements and Optimization in Sloshing Simulation
Several areas can improve the project further:
- Different tank configurations: Apply the process to tanks with new dimensions and water heights.
- Using newer Abaqus versions: Leverage versions 2020 or 2022 for direct Rayleigh damping application, and improved hourglass scaling.
-
Mesh sensitivity studies: Analyze how mesh size impacts accuracy and efficiency.
Conclusion
This article focused on sloshing simulation in cylindrical liquid storage tanks, with an emphasis on modeling, analysis, and validation using Abaqus CAE. Sloshing is important because it affects structural safety, especially under dynamic loads such as earthquakes, and can lead to roof damage or spills if not properly addressed.
The study began by defining sloshing and explaining its role in tank sloshing simulation. It then described the software tools used, highlighting Abaqus features such as ALE adaptive meshing, Us-Up models, and hourglass control. Earthquake excitation was introduced through the El-Centro record to provide realistic dynamic input. Material properties of both concrete tanks and water were defined, with damping factors based on ACI standards and Housner’s model.
The methodology was outlined step by step, covering setup, meshing, boundary conditions, and job submission. Validation was performed by comparing results with ANSYS APDL references, ensuring reliability. Finally, areas for improvement were suggested, including mesh sensitivity studies, newer Abaqus versions, and alternative tank configurations.
From this overview, the article shows that precise sloshing simulation techniques improve accuracy in predicting liquid motion under seismic effects. The structured approach ensures that tanks are designed to withstand dynamic liquid behavior, supporting safer and more reliable storage systems.
Explore our comprehensive Abaqus tutorial page, featuring free PDF guides and detailed videos for all skill levels. Discover both free and premium packages, along with essential information to master Abaqus efficiently. Start your journey with our Abaqus tutorial now!
ALE adaptive meshing is applied to the water domain to prevent mesh distortion. Water undergoes large deformations during sloshing, and without adaptive meshing, the mesh aspect ratio can degrade, potentially leading to simulation errors or termination.
Rayleigh damping factors (α and β) are calculated using a matrix equation involving the impulsive (ζi) and convective (ζj) damping ratios, and the impulsive (ωi) and convective (ωc) angular frequencies. The recommended damping ratios are 5% for the impulsive part and 0.5% for the convective part, as per ACI standards.
The Us-Up Hugoniot equation of state is employed in Abaqus to analyze water behavior. In older Abaqus versions, dynamic viscosity was introduced because these versions did not support applying Rayleigh damping directly to the Us-Up model, and viscosity helped prevent mesh distortion and achieve a real solution.
ALE adaptive meshing is applied to the water domain to prevent mesh distortion. Water undergoes large deformations during sloshing, and without adaptive meshing, the mesh aspect ratio can degrade, potentially leading to simulation errors or termination.
Rayleigh damping factors (α and β) are calculated using a matrix equation involving the impulsive (ζi) and convective (ζj) damping ratios, and the impulsive (ωi) and convective (ωc) angular frequencies. The recommended damping ratios are 5% for the impulsive part and 0.5% for the convective part, as per ACI standards.
The Us-Up Hugoniot equation of state is employed in Abaqus to analyze water behavior. In older Abaqus versions, dynamic viscosity was introduced because these versions did not support applying Rayleigh damping directly to the Us-Up model, and viscosity helped prevent mesh distortion and achieve a real solution.